���ڄ�(d��ng)�B(t��i)��(sh��)��(j��)�Ĵ�����œҺλ�y(c��)���������о�
�l(f��)���r(sh��)�g��2019-06-22 �l(f��)�����ߣ�
ժ Ҫ���ڌ�(sh��)�H�У�Һλ�y(c��)��ϵ�y(t��ng)�Ǵ���ȼ���o�O(ji��n)��ϵ�y(t��ng)����Ҫ�M�ɲ��֣�Һλ�Ĝ�(zh��n)�_�y(c��)��Ҳ��ϵ�y(t��ng)��(w��n)����(zh��n)�_�����ı�Ҫǰ�ᡣ���Ľ�B�˰��b�ɂ�(g��)������sҺλӋ(j��)��ÿһ��(g��)������(n��i)���y(c��)����œҺλ�߶ȵķ�ʽ������ij���ʹ�����œ�������M(j��n)�Д�(sh��)�W(xu��)��ģ��������(d��ng)�B(t��i)Һλ�Ĕ�(sh��)��(j��)ģ�ͣ�̽ӑ���ڄ�(d��ng)�B(t��i)��(sh��)��(j��)��Һλ�߶Ȝy(c��)����������Q�ˌ�(sh��)�H���a(ch��n)��Һλ�O(ji��n)�ص�����
�����(l��i)������Ӌ(j��)��C(j��)���g(sh��)�ڜy(c��)����(bi��o)��(zh��n)�b���ϵďV����(y��ng)�ã��҇�(gu��)��(du��)��(d��ng)�B(t��i)����Һλ�y(c��)�����Ԅ�(d��ng)��ˮƽ�ڲ������ߣ����o�B(t��i)�^(gu��)���М�(zh��n)�_�،�(sh��)�F(xi��n)�ˌ�(du��)ʹ���^(gu��)�̵Č�(sh��)�r(sh��)�O(ji��n)�غ͜y(c��)�㣬���ڄ�(d��ng)�B(t��i)�̓Aб��B(t��i)�y(c��)���Ĝ�(zh��n)�_���ڌ�(sh��)�H��(y��ng)���ж�����һ���ľ����ԡ�����҂������˔�(sh��)�W(xu��)��ģ��ͨ�^(gu��)��(du��)���g��(d��ng)�B(t��i)ģ�͵Ĕ�(sh��)��(j��)����Ӌ(j��)�㣬�M���p�ٜy(c��)���е��`��ṩ��(sh��)�r(sh��)Һλ�y(c��)��Ĝ�(zh��n)�_�ԣ��F(xi��n)����(ji��n)�εĽ�B��
1 ������sҺλӋ(j��)�y(c��)��ԭ�������b
������sҺλӋ(j��)�Ǵ��|(zh��)�дŻ�����ĸ�׃������|(zh��)�����g��ĸ�׃���Ķ�ʹ���F���|(zh��)���L(zh��ng)�Ȱl(f��)����׃��֪Һλ�ĸ߶ȣ����ɴ��Ը��ӡ�׃�������b�д��¾��IJ��P䓜y(c��)���ܽM�ɡ�
��(d��ng)׃������ͨ�Դ��,�}�_�l(f��)�����ͽ������_ʼ����,�l(f��)�������r(sh��)���¶˰l(f��)�͵����ԃ���}�_��̖(h��o)���}�_����ň�(ch��ng)���������s�������\(y��n)�У���(d��ng)�}�_��̖(h��o)�Ĵň�(ch��ng)�c���������r(sh��)���a(ch��n)��Ť��(y��ng)���}�_���@��(g��)Ť��(y��ng)���}�_����¾��ɶ˂��ͣ������_(d��)��Ť��(y��ng)���}�_���������գ����ς��_(d��)��Ť��(y��ng)���}�_�����������ղ��z�y(c��)����(l��i)������(j��)�ij��l(f��)ԃ���}�_�����շ���Ť��(y��ng)���}�_�ĕr(sh��)�g��Ϳ�Ӌ(j��)���Һλ�ĸ߶Ȳ��D(zhu��n)�Q��4~20mA��ݔ����̖(h��o)��
2 ������œ��ģ����œҺλ�y(c��)���㷨
2.1 ������œ��ģ
������œ�����Dz��M��ͬ�ġ����˝M���ʽ������œҺλ�Ĝy(c��)���҂��茦(du��)��œ�M(j��n)�н�ģ��
��(du��)��œҎ(gu��)������������O(sh��)����œ��Ҏ(gu��)�t������(j��)��œҺλ���������Ԛw��������(1)Һλ������ֱ�������w�e�c�߶ȳ����ȣ��C����œ���治׃���������棬����ײ��ИOС�����棬���Ժ��ԡ�(2)Һλ�������۾����C�������փɶε����棬����С�������(3)Һλ���������������g
�Ξ�ֱ�����C����œ�ײ���E�A��A�Ρ��F���w���в������w���ϲ���E�A��A�Ρ�
����(bi��o)ϵ���մ���ͨ������(bi��o)ϵ�������£�
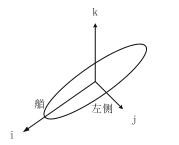
���x�v�A�ǶȞ� α 1 ��������?y��n)鴬���������?i → k ���M�A�ǶȞ� α 2 ��������?y��n)���?c��)̧���� j → k ��
���� i - j ƽ�桢������ʎ���u���ڮa(ch��n)�����\(y��n)��(d��ng)�����Ҳ��ϳɣ�ͨ�^(gu��)���ڃ�(n��i)�����ƽ��ֵ������������ˣ�ֻ�迼�]���v�A�͙M�A�ĺϳɡ��ϳɕr(sh��)������ʸ���ϳ�Ҏ(gu��)�t�M(j��n)�мӷ��\(y��n)�㣬���������D(zhu��n) α 1 �������D(zhu��n) α 2 ��
k ’�c k �ĽǶȼ���ϳɃAб�Ƕȣ�����Ӌ(j��)��ķ��㣬�㷨��ʽ��ֱ���ñ��ƌ�(d��o)��ԭʼ��(sh��)��(j��)�M(j��n)��Ӌ(j��)�㡣
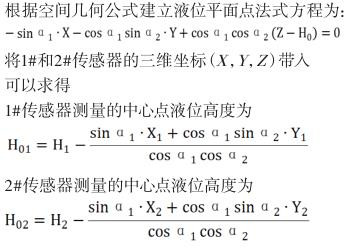
����Ӌ(j��)��ķ��㣬����������(bi��o)ϵԭ�c(di��n)��Һ��߶� H =0̎���˕r(sh��)����(j��)����(bi��o)ϵ�x��(y��ng)����Ӌ(j��)��Ļ���ԭ�t���x��ײ�ƽ���ˮƽ�棬����(bi��o)ԭ�c(di��n)��0��0��Ҏ(gu��)���錦(du��)�Q�c(di��n)��
2.2 ��œҺλ�y(c��)���㷨
ݔ��l��
1#������sҺλӋ(j��)���bλ�ã�X 1 ��Y 1 �����y(c��)���߶Ȟ�H 1 ��
2#������sҺλӋ(j��)���bλ�ã�X 2 ��Y 2 �����y(c��)���߶Ȟ�H 2 ��
�ⲿݔ������݃x�y(c��)��������B(t��i)���v�A�Ǟ�α 1 ���M�A�Ǟ�α 2 ��
�㷨�ƌ�(d��o)
�`��������߶Ⱥϳ�
��?y��n)���������bλ�ã��Լ���œˮƽ����IJ��_���ԡ���˃��߸߶Ȳ��ܺ�(ji��n)�������ƽ��ֵ����횸���(j��)Ӱ푵ę�(qu��n)���M(j��n)�з�����
����(j��)�������ղ�ֵ�l������(d��ng)���� n ��(g��)�c(di��n)�r(sh��)�����Խ��� n -1�ζ��(xi��ng)ʽ�����`��^��(du��)ֵ�M��
���� c �� n ��(g��)�c(di��n)�^(q��)�g��(n��i)�� n �A��(d��o)��(sh��)�^��ֵ̎���ڱ����У� n =2����˿��Ԙ�(g��u)��1�κ���(sh��) Y = aX + b �M(j��n)��Ӌ(j��)�㣬��ʹ���`���^С����Ҫ��(du��)��Ϣ�M(j��n)��̎����
��ǰ��������Һ��ߡ��ͷֽ羀ͨ�^(gu��)����(bi��o)ԭ�c(di��n)��0��0��0������ʸ����k'�S��ԭˮƽ��i-jͶӰ��ƽ���(n��i)���������]���������ղ�ֵӋ(j��)�㹫ʽ�У���(d��ng)����(bi��o)�c(di��n)���ڜy(c��)���c(di��n)֮�g�r(sh��)�`���^С����˲��Â��������ߵ�Һλ�ֽ羀���x���酢��(sh��)����(qi��ng)���h(yu��n)���x�c(di��n)����Ϣ��(qu��n)�����õ��Ěwһ������^��(y��u)�⡣
����ɂ�(g��)�������y(c��)���c(di��n)���B���c�����Sk���ཻ���t�����κ���ʽ�ľ��ԽM��Ӌ(j��)��ϳɸ߶ȣ������ܱ���ϵ�y(t��ng)�`�
�@ʾ�Y(ji��)����
�ɘ����ڲ��ú���(sh��)�xֵ����ʽ�o������λ�C(j��)ÿ1s��һ�Δ�(sh��)��(j��)����λ�C(j��)���V��������Ҳ���Ӱ푡��Y(ji��)����2s��ˢ���l�����@ʾ�����@ʾ��
��(du��)�ڴ�����sҺλӋ(j��)ֱ�Ӳɘ�ֵ��ƽ��ֵ�ĞV��̎�������·��оƬ�й̻�������ɡ�
3 ��œҺλ�y(c��)����Ҋ�Ć��}
��œ�Π���ǧ�˰ّB(t��i)�ģ����b������sҺλӋ(j��)λ��Ҳ���̶������������^(gu��)���ЃAб�ǶȺ͙M�v����Ҳ�Dz�ͬ�ġ������œҺλ�y(c��)����Щ��Ҋ�Ć��}��
(1)������sҺλӋ(j��)���bλ�ò�ͬ�y(c��)������(l��i)��ֵ��(hu��)�м�(x��)��ͬ��
(2)������sҺλӋ(j��)���b�r(sh��)�����ֱ����Ȼ��(hu��)�Мy(c��)������(zh��n)��r��
4 �Y(ji��)�Z(y��)
��(du��)������œ��Һλ�ľ��_�y(c��)�����ЏV���đ�(y��ng)���Ј�(ch��ng)���S���ۿڡ����������ϴ��͘��������İl(f��)չ��������ʽ������(y��ng)�\(y��n)�������ڸ��N��������΄�(w��)���^(gu��)���У��\(y��n)��Ӌ(j��)��C(j��)���g(sh��)��(sh��)�r(sh��)�O(ji��n)�y(c��)�����ij�ˮ�����dœ��ȼ��œ��Һλ���y(c��)���Ĕ�(sh��)��(j��)��(du��)������(w��n)�ԡ����w��ȫ��ʩ����ȫ�����e���p�ص����x��
 �ھ��ͷ�1̖(h��o)
�ھ��ͷ�1̖(h��o)